大工人工智能研究中心一项成果被人工智能领域顶级会议录用
时间: 2018/04/28 14:56:22 点击: 次
近日,学校人工智能研究中心的一项研究成果被即将在瑞典召开的2018年国际人工智能联合会议(International Joint Conference on Artificial Intelligence,IJCAI 2018)录用。IJCAI是人工智能领域的顶级综合学术会议,被中国计算机学会(CCF)推荐国际学术会议列表认定为A类会议,在该领域具有极大的影响,代表人工智能领域的最高水平和发展方向。本届IJCAI大会收到3470篇论文投稿,录用710论文录用率仅为20.5%。此项研究成果的取得,标志着学部在人工智能领域取得了更多标志性的进步。
录取论文简介:
论文“Active Object Reconstruction Using a Guided View Planner”,作者:杨鑫、王元博(研究生)、王雅茹(研究生)、尹宝才、张强、魏小鹏。受启发于近年来深度学术技术在基于图片的目标重建问题上的诸多成功案例,提出一个主动式目标重建的框架,能够在目标重建过程中动态地预测观察视角的选择,并将这一视角规划过程与多视角的重建有机结合成统一的深度学习模型,实现目标重建与视角预测的同步进行。这一工作有两方面与其他基于深度学习的目标重建方法不同。第一,这一工作主要关注空间中不同观察视点对目标重建质量的影响,提出的主动式模型能够探索视点与三维结构的关联,并指导性地训练视角的决策过程,使得模型预测的视角往往能够获得更多的信息,使得重建质量得到提升;第二,这一工作试图将深度学习技术与传统的立体视觉方法相结合,基于传统方法中三维点与二维像素之间投影关联思想,构建了Volume-Projection Guidence(体-投影指导)模型来训练三维目标重建和视角预测过程,降低重建误差的同时提高了视角的预测质量。实验证明我们的模型(1)能够在重建过程中随着视角的增多逐步提升重建质量,(2)相比其他方法,能够预测一个信息量更丰富、使重建质量提升更快的视角序列,提高重建的效率。该工作在面向机器人的场景自主理解方面有重要的实用应用价值。
该工作受到国家自然科学基金重点项目“基于视觉和语义的室内场景理解与实时建模”、国家自然科学基金重大研究计划培育项目“面向动态非结构环境的共融机器人自然交互方法研究”、国家自然科学基金人工智能应急重点项目“基于DNA计算的人工智能新方法”、NSFC-辽宁省联合基金重点支持项目“仿人灵巧手的操作规划方法研究”项目的支持。
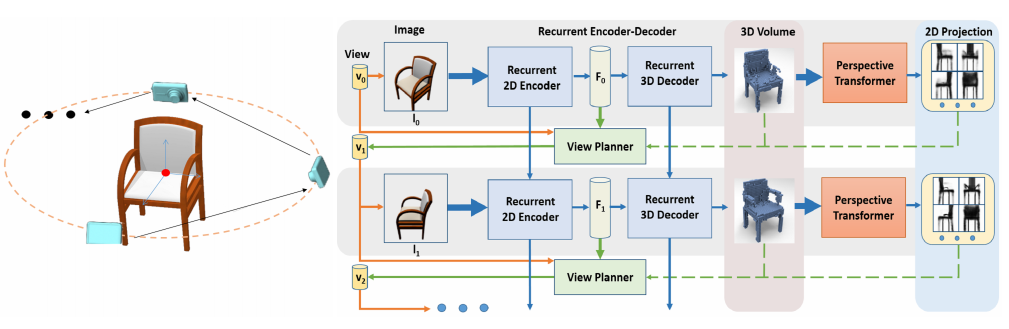
(图中是主动式重建模型的流程图,对于待重建目标,起始于周围的一个随机视角,模型将该视角下观察到的图片输入到重建网络中,预测出全局的三维结构,并通过视角预测网络预测出下一个视角,使得在这一视角下,能够获得更多对三维重建有帮助的信息,并将这一视角与先前视角结合,从而提升上一时间步的重建结果。)
大连理工大学人工智能研究中心成立于2017年,是学校唯一专门设立的面向人工智能相关领域的独立科研机构,学部尹宝才教授为该中心主任,张强教授为副主任,整合了电信学部计算机、控制、信通、生物医学等相关学科,充分发挥交叉学科优势,针对人工智能的核心理论与方法,设立类脑智能、大数据智能、机器人智能三个研究方向,研究以大数据智能、跨媒体智能、自主智能、人机混合增强智能和群体智能等为代表的新一代人工智能技术。